dspace hil測試_hil臺架測試
引言
什么是自動駕駛仿真測試
虛擬仿真技術(shù)是汽車研發(fā)、制造、驗證測試等環(huán)節(jié)不可或缺的技術(shù)手段,能有效縮短技術(shù)和產(chǎn)品開發(fā)周期,降低研發(fā)成本;隨著汽車智能化、網(wǎng)聯(lián)化趨勢的發(fā)展,虛擬仿真技術(shù)有了更大的發(fā)揮空間,比如自動駕駛系統(tǒng)的仿真測試驗證;虛擬仿真測試是實現(xiàn)高階自動駕駛落地應(yīng)用的關(guān)鍵一環(huán),具備自動駕駛功能的車輛必須經(jīng)過大量的虛擬仿真測試以及實車路測之后才能商用化;
自動駕駛汽車商用化需經(jīng)歷的三個測試階段:仿真測試、封閉場地測試、開放道路測試。
自動駕駛仿真測試:主要是以數(shù)學(xué)建模的方式將自動駕駛的應(yīng)用場景進(jìn)行數(shù)字化還原,建立盡可能接近真實世界的系統(tǒng)模型,無需實車直接通過軟件進(jìn)行仿真測試便可達(dá)到對自動駕駛系統(tǒng)及算法的測試驗證目的。
仿真測試包括以下幾種類型:模型在環(huán)仿真(MIL)— 軟件在環(huán)仿真(SIL)— 硬件在環(huán)仿真(HIL)— 整車在環(huán)仿真(VIL)
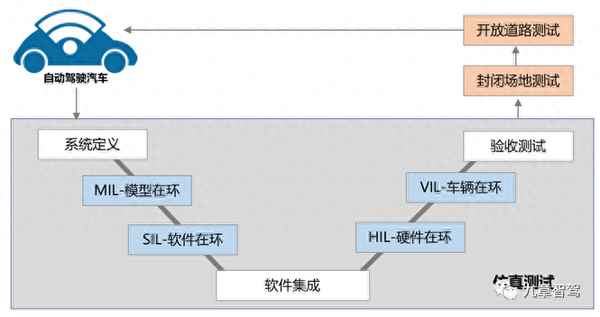
自動駕駛系統(tǒng)開發(fā)V字流程
自動駕駛仿真測試的必要性
實車道路測試面臨的問題:
據(jù)美國蘭德公司研究:一套自動駕駛系統(tǒng)至少需要通過110億英里的駕駛數(shù)據(jù)來進(jìn)行系統(tǒng)和算法的測試驗證才能達(dá)到量產(chǎn)的條件;因此單純依靠實車路測極難完成這一目標(biāo),并且實車路測還存在以下問題:
- 道路測試周期長,成本高,效率低
- 覆蓋的場景工況有限,尤其是對于“corner case”,很難復(fù)現(xiàn)
- 對于一些極端的危險場景,道路測試安全性無法保障
仿真測試的優(yōu)勢:
- 測試場景配置靈活,場景覆蓋率高;
- 測試過程安全,且對于一些“corner case”能夠進(jìn)行復(fù)現(xiàn)再測試
- 可實現(xiàn)自動測試和云端加速仿真測試,有利于提升測試效率和降低測試成本
實車測試與仿真測試方案對比
備注:● 真實 ○ 虛擬 ◎ 虛擬或部分真實 數(shù)據(jù)參考:中國汽車工程研究院
三者之間的關(guān)系
仿真測試、封閉場地測試、開放道路測試三者之間互相補(bǔ)充,形成測試閉環(huán),共同促進(jìn)自動駕駛車輛的研發(fā)和標(biāo)準(zhǔn)體系建立:
1)仿真測試結(jié)果可以在封閉場地和開放道路進(jìn)行測試驗證;
2)通過道路測試得出的危險場景,將會反饋到仿真測試中,便可有針對性的去調(diào)整設(shè)定場景和參數(shù)空間;
3)仿真測試和封閉場地測試的最終結(jié)果要進(jìn)行綜合評價,基于評價結(jié)果不斷地去完善評價準(zhǔn)則和測試場景庫。
仿真測試、封閉場地測試、道路測試形成閉環(huán)促進(jìn)研發(fā)及標(biāo)準(zhǔn)建立(資料來源- i-VISTA)
自動駕駛仿真測試的重要構(gòu)成:場景庫、仿真平臺、評價體系;其中,場景庫是基礎(chǔ),仿真平臺是核心,評價體系是關(guān)鍵;三者緊密耦合,相互促進(jìn):場景庫的建設(shè)需要仿真平臺和評價體系作為指導(dǎo),仿真平臺的發(fā)展進(jìn)化需要場景庫和評價體系作為支撐,而評價體系的建立和完善也需要以現(xiàn)有的場景庫和仿真平臺作為參考基礎(chǔ);接下來筆者將從場景庫、仿真平臺、評價體系這三個重要方面依次展開來介紹。
一、場景庫
1.1 什么是測試場景,包含哪些核心要素?
自動駕駛測試場景定義:自動駕駛汽車與其行駛環(huán)境各組成要素在一段時間內(nèi)的總體動態(tài)描述,要素組成由所期望檢驗的自動駕駛汽車的功能決定;(定義引自:中汽協(xié)團(tuán)體標(biāo)準(zhǔn)-自動駕駛系統(tǒng)功能測試第7部分 – 仿真測試)簡言之,場景可以被視為是自動駕駛汽車行駛場合與駕駛情景的有機(jī)組合。具有場景無限豐富、極其復(fù)雜、難以預(yù)測、不可窮盡等特點。
測試場景要素:測試車輛自身要素以及外部環(huán)境要素;外部環(huán)境要素又包括:靜態(tài)環(huán)境要素、動態(tài)環(huán)境要素、交通參與者要素、氣象要素等。
測試場景要素劃分
1.2 什么是場景庫?場景庫中測試場景的數(shù)據(jù)來源?
場景庫定義:滿足某種測試需求的一系列自動駕駛測試場景構(gòu)成的數(shù)據(jù)庫。場景庫能夠完成從場景數(shù)據(jù)的管理到場景測試引擎的橋接,實現(xiàn)從場景的自動產(chǎn)生、管理、存儲、檢索、匹配,到最后注入測試工具。
場景庫包含4種典型測試場景(中汽中心基于數(shù)據(jù)來源不同的一種分類方法):自然駕駛場景、危險工況場景、標(biāo)準(zhǔn)法規(guī)場景、參數(shù)重組場景。
四種典型測試場景
測試場景的數(shù)據(jù)來源主要包括三大部分:真實數(shù)據(jù)、模擬數(shù)據(jù)以及專家經(jīng)驗
1)真實數(shù)據(jù):即現(xiàn)實世界真實發(fā)生的,經(jīng)過傳感器采集到或以其它形式被記錄保存下來的真實場景數(shù)據(jù),包括自然駕駛數(shù)據(jù)、交通事故數(shù)據(jù)、路側(cè)單元監(jiān)控數(shù)據(jù)、封閉場地測試數(shù)據(jù)以及開放道路測試數(shù)據(jù)等;
2)模擬數(shù)據(jù):主要包括駕駛模擬器數(shù)據(jù)和仿真數(shù)據(jù);前者是利用駕駛模擬器進(jìn)行測試得到的場景要素信息;后者是自動駕駛系統(tǒng)或車輛在虛擬仿真平臺上進(jìn)行測試得到的場景要素信息。
3)專家經(jīng)驗數(shù)據(jù):基于專家的仿真測試經(jīng)驗總結(jié)歸納出來的場景要素信息,其中標(biāo)準(zhǔn)法規(guī)就是專家經(jīng)驗數(shù)據(jù)的典型代表。
測試場景數(shù)據(jù)來源
備注:測試場景數(shù)據(jù)來源參考《自動駕駛系統(tǒng)功能測試第7部分:仿真測試(征求意見稿)》
1.3 場景庫的搭建流程
搭建流程:
- 確定單個虛擬場景的數(shù)據(jù)存儲方式與標(biāo)準(zhǔn)
- 構(gòu)建單個自動駕駛虛擬測試場景
- 在眾多的虛擬測試場景中根據(jù)特征標(biāo)簽選取適當(dāng)場景作為場景庫的組成部分
自動駕駛測試場景構(gòu)建流程(圖片參考:中汽數(shù)據(jù)有限公司)
自動駕駛研發(fā)測試與場景庫的搭建形成閉環(huán):測試場景庫的搭建,能有效驅(qū)動自動駕駛的研發(fā)測試工作,自動駕駛的研發(fā)測試反過來也能夠為場景庫提供反饋意見,豐富場景庫。
1.4 國內(nèi)場景庫發(fā)展現(xiàn)狀
現(xiàn)狀分析:
- 場景庫的數(shù)據(jù)格式標(biāo)準(zhǔn)制定涉及國家多個部委,由于缺乏有效溝通協(xié)調(diào)機(jī)制,標(biāo)準(zhǔn)制定落后市場進(jìn)展,故當(dāng)前數(shù)據(jù)庫的建設(shè)處于各自為戰(zhàn)的狀態(tài);
- 場景庫數(shù)據(jù)格式標(biāo)準(zhǔn)不統(tǒng)一,全國統(tǒng)一的場景庫很難形成,進(jìn)而又影響到了自動駕駛仿真評價、認(rèn)證體系的建立。
國內(nèi)典型場景庫介紹
附表1. 中國典型場景庫介紹
1)中汽數(shù)據(jù)有限公司 – 自建場景庫
場景庫覆蓋范圍:自然駕駛場景庫(1228種)、功能安全場景庫(110種)、V2X場景庫、危險事故場景庫(206種)、中國特有交通法規(guī)場景庫(82種)、和預(yù)期功能安全場景庫(70種)等。
a. 自然駕駛場景庫
基于中國不同道路拓?fù)浣Y(jié)構(gòu)、交通基礎(chǔ)設(shè)施、環(huán)境條件、車輛信息的動靜態(tài)要素特征,從不同維度對數(shù)據(jù)庫進(jìn)行分類構(gòu)建和更新迭代:
- 地域覆蓋 - 北京、天津、上海等重點城市
- 工況覆蓋 - 高速、城市、鄉(xiāng)村、停車場等重點領(lǐng)域
- 環(huán)境覆蓋 - 晴天、雨天、雪天、霧霾等多種天氣
- 建立了可適用24項ADAS測試的功能場景庫、邏輯場景庫
b. 功能安全場景庫
- 基于場景ODD元素重組、虛擬仿真場景復(fù)現(xiàn)、關(guān)鍵場景仿真驗證等技術(shù)手段研發(fā)功能安全場景庫
- 遵照ISO26262標(biāo)準(zhǔn),對ADAS系統(tǒng)功能安全危害-ASIL風(fēng)險等級提供有據(jù)可依的量化評估方案
功能安全場景庫生成過程:
第一步:參考ODD分類的國際標(biāo)準(zhǔn),對駕駛區(qū)域、天氣、光線等7大類場景要素以及30類子要素進(jìn)行排列與重組,進(jìn)而形成體系化功能場景庫;
第二步:將上述功能場景,基于真實路采場景數(shù)據(jù),調(diào)整相關(guān)參數(shù)范圍從而得到相應(yīng)的邏輯場景,最后在仿真軟件中搭建駕駛場景與周邊環(huán)境,形成所需的復(fù)現(xiàn)場景;
第三步:在仿真驗證軟件中,激活A(yù)DAS功能,對復(fù)現(xiàn)場景下的電子電氣失效展開仿真驗證,并對產(chǎn)生的風(fēng)險進(jìn)行評估,根據(jù)公式計算出嚴(yán)重度(S)、暴露度(E)和可控性(C),最后根據(jù)ISO26262標(biāo)準(zhǔn)最終確定ASIL風(fēng)險等級。
c. V2X 場景庫
- 根據(jù)LTE-V終端及DSRC終端應(yīng)用層開發(fā)經(jīng)驗以及《合作式智能運輸系統(tǒng)車用通信系統(tǒng)應(yīng)用層及應(yīng)用數(shù)據(jù)交互標(biāo)準(zhǔn)》中的場景要求進(jìn)行場景庫構(gòu)建
- 從數(shù)據(jù)安全、通信安全、控制安全、身份安全等四個方面進(jìn)行V2X場景數(shù)據(jù)積累研究
- 建立了V2X 測試場景庫創(chuàng)建流程,形成測試用例3500條
2)中國汽車工程研究-自建場景庫
場景庫數(shù)據(jù)來源:標(biāo)準(zhǔn)法規(guī)、交通事故、人工經(jīng)驗以及自然駕駛數(shù)據(jù)。
場景庫生成方案:場景數(shù)據(jù)采集、場景分類提取、場景數(shù)據(jù)標(biāo)注、場景聚類、場景重構(gòu)、虛擬場景轉(zhuǎn)化等。
場景庫V2.0生成方案(來源-中國汽車工程研究院)
中國典型場景庫V2.0:
- 參考德國PEGASUS項目的場景分類體系及ASAM推出的OpenDRIVE 和OpenSCENARIO仿真格式
- 包括標(biāo)準(zhǔn)法規(guī)場景1000例、經(jīng)驗式場景3000+例、重構(gòu)場景5萬+例、事故場景150+例
2020年12月,“中國典型場景庫”在V2.0版本的基礎(chǔ)上升級到V3.0:
- 在2.0版本的基礎(chǔ)上,新增了典型事故場景、自動駕駛事故場景和預(yù)期功能安全場景三大板塊
- 涵蓋總計20余項自動駕駛功能;總量大于10萬例的OpenX標(biāo)準(zhǔn)格式場景文件
- 為了便于企業(yè)的自動駕駛技術(shù)開發(fā),把場景庫分為基礎(chǔ)、初級、中級、高級四個模塊等級
四個等級場景包(數(shù)據(jù)來源-中國汽研官網(wǎng))
3)百度 – 自建場景庫
涵蓋場景類型:
- 法規(guī)標(biāo)準(zhǔn)場景:滿足基本的標(biāo)準(zhǔn)法規(guī)要求
- 危險工況場景:保證自動駕駛的安全性
- 能力評估場景:評價自動駕駛能力
典型場景類型數(shù)量:200種左右
涵蓋:不同的道路類型、障礙物類型、道路規(guī)劃、紅綠燈信號
測試場景數(shù)據(jù)來源:自然駕駛路采數(shù)據(jù)、交通數(shù)據(jù)庫、人工經(jīng)驗等。
測試場景基于生成方案的不同又分為:Logsim場景和Worldsim場景,目前總共提供了 220 個Worldsim場景和 17個Logsim場景。
a. Logsim:由路測數(shù)據(jù)提取的場景,提供復(fù)雜多變的障礙物行為和交通狀況,場景充滿不確定性
b. Worldsim:由人為預(yù)設(shè)的障礙物行為和交通燈狀態(tài)構(gòu)成的場景,場景簡單
4)騰訊– 自建場景庫
路測實采數(shù)據(jù)積累:截止到2020年,已經(jīng)積累了超過50萬公里交通場景數(shù)據(jù)。
涵蓋場景類型:車輛避撞能力、交通合規(guī)性、行為能力、視距影響下交叉路口車輛沖突避免、碰撞預(yù)警、緊急制動、危險變道、無信號交叉口通行、行人橫穿等方面。
典型場景類型數(shù)量:1000種左右
場景生成方案:通過Agent AI能力,可以自由生成各種隨機(jī)的駕駛場景
二、仿真平臺
2.1 仿真平臺典型架構(gòu)
仿真平臺一般包括仿真框架、物理引擎和圖形引擎;其中仿真框架是平臺軟件平臺的核心,支持傳感器仿真、車輛動力學(xué)仿真、通信仿真、交通環(huán)境仿真等;
1)傳感器仿真:支持支持?jǐn)z像頭、激光雷達(dá)、毫米波雷達(dá)以及GPS/IMU等傳感器仿真;
2)車輛動力學(xué)仿真:基于多體動力學(xué)搭建的模型,將包括轉(zhuǎn)向、懸架、制動、I/O硬件接口等在內(nèi)的多個真實部件進(jìn)行參數(shù)化建模,進(jìn)而實現(xiàn)車輛模型運動過程中的姿態(tài)和運動學(xué)仿真模擬;
3)交通場景仿真:包括靜態(tài)場景還原和動態(tài)場景仿真兩部分,靜態(tài)場景還原主要通過高精地圖和三維建模技術(shù)來實現(xiàn);
動態(tài)場景仿真既可通過把真實路采數(shù)據(jù)經(jīng)過算法抽取后,再結(jié)合已有高精地圖進(jìn)行創(chuàng)建,也可通過對隨機(jī)生成的交通流基于統(tǒng)計學(xué)的比例,經(jīng)過人工設(shè)置相關(guān)參數(shù)后自動生成復(fù)雜的交通環(huán)境;
例如可模擬自動駕駛汽車在現(xiàn)實世界中可能遇到的極端情況和危險情況,從模擬暴雨和暴雪等惡劣的天氣條件到較弱的光線照明,再到周圍車輛的危險操作等;
4)V2X仿真(通信仿真):支持創(chuàng)建真實或虛擬傳感器插件,使用戶能夠創(chuàng)建特殊的V2X傳感器;既可以用來測試V2X系統(tǒng),又可生成用于訓(xùn)練的合成數(shù)據(jù);
仿真平臺典型架構(gòu)(圖片參考-2019自動駕駛仿真技術(shù)藍(lán)皮書)
2.2 國內(nèi)典型自動駕駛仿真平臺
附表2. 國內(nèi)典型自動駕駛仿真平臺信息梳理
注:√- 有此功能 ×-無此功能 — Unknown
1)浙江天行健智能科技 – Panosim
平臺類型:面向汽車自動駕駛技術(shù)與產(chǎn)品研發(fā)的一體化仿真與測試平臺
平臺特點:
- 支持實時在線仿真:MIL/SIL/HIL/VIL
- 支持ADAS技術(shù)與產(chǎn)品的開發(fā)與測試
- 支持駕駛模擬體驗與人機(jī)共駕系統(tǒng)的研發(fā)與測試
- 支持感知、規(guī)劃、決策、控制算法研發(fā)與測試
- 高置信度車輛動力學(xué)模型:對標(biāo)CarSim,支持27自由度復(fù)雜動力學(xué)模型
2)51WORLD – 51Sim-One
平臺類型:覆蓋自動駕駛?cè)鞒痰囊惑w化集成的仿真測試平臺
平臺特點:
- 可實現(xiàn)多傳感器仿真、交通流與智能體仿真、感知與決策仿真、自動駕駛行為訓(xùn)練等功能
- 可擴(kuò)展的并行分布式仿真架構(gòu),可部署在單機(jī)、私有云和公有云環(huán)境
- 支持實時在線仿真:HIL/DIL
- 自動駕駛數(shù)字孿生評價測試
- 平臺內(nèi)置了一系列場景庫和測試案例庫
- 軟件平臺提供Python、C++、ROS、OSI等API接口
- 支持多車協(xié)同互動:平臺支持接入多個測試系統(tǒng),包括自動和手動駕駛系統(tǒng)
3)騰訊 – TAD Sim
平臺類型:基于虛幻引擎打造的虛實結(jié)合、線上線下一體化的仿真測試平臺
平臺特點:
- 集成了游戲引擎、三維重建技術(shù)、車輛動力學(xué)模型、虛實一體交通流等技術(shù)
- 游戲技術(shù)的應(yīng)用可實現(xiàn)場景的幾何還原、邏輯還原及物理還原
- 一套系統(tǒng)滿足全棧算法使用需求:能夠完成從感知到?jīng)Q策規(guī)劃,再到控制的全算法閉環(huán)仿真測試驗證
- 一套系統(tǒng)滿足MIL/SIL/HIL/VIL使用需求,覆蓋了完整的汽車V字開發(fā)流程
- 內(nèi)置高精地圖,支持全國高速和快速路仿真
4) 沛岱(上海)技術(shù)有限公司– Pilot-D GaiA
平臺類型:基于德國自動駕駛仿真核心技術(shù)所研發(fā)的仿真測試平臺
平臺特點:
- 提供高保真的環(huán)境傳感器仿真:激光雷達(dá)、毫米波雷達(dá)以及攝像頭仿真等
- 提供C++和MATLAB接口,適配于不同的車輛和系統(tǒng)
- 提供三個版本的軟件解決方案:Standard版-單機(jī)解決方案,NET版-云計算和互動測試解決方案,RT版-提供HIL和VIL仿真測試
- 支持交互式自動駕駛仿真:同一虛擬場景下,多臺主機(jī)(車輛)進(jìn)行互聯(lián)仿真測試
- 提供基于VR/MR/AR的駕駛員模擬
2.3 國外典型仿真測試平臺
附表3. 國外典型自動駕駛仿真平臺信息梳理
注:√- 有此功能 ×-無此功能 — Unknown
1)西門子 – PreScan
類型:以物理模型為基礎(chǔ)的傳統(tǒng)汽車仿真平臺
平臺特點:
- 仿真流程主要分為四個步驟:搭建場景、添加傳感器、添加控制系統(tǒng)、運行仿真
- 可在開環(huán)、 閉環(huán)以及離線和在線模式下運行
- 支持導(dǎo)入 OpenDrive 格式的高精地圖
- 支持與第三方動力學(xué)軟件聯(lián)合仿真,如CarSim、dSPACE ASM、 VI-Grade、AmeSIM等
- 支持與其它類型第三方的軟件的聯(lián)合仿真,如Matlab& Simulink,MOMO & Logitech 轉(zhuǎn)向操縱臺 、dSPACE / 控制臺、HIL工具(ETAS、dSPACE 、Vector、OpalRT等)
- 支持基于云端布置大規(guī)模仿真
2)MSC Software – VTD
類型:傳統(tǒng)汽車仿真平臺
平臺特點:
- 支持從SIL 到 HIL 和 VIL 的全周期開發(fā)流程
- 支持與第三方的工具和插件聯(lián)合仿真
- 平臺的功能和存儲支持開放格式:OpenDrive, OpenCRG和OpenScenario
- 仿真流程主要分三個步驟:路網(wǎng)搭建, 動態(tài)場景配置, 仿真運行
——提供圖形化的交互式路網(wǎng)編輯器 Road Network Editor (ROD), 在構(gòu)建路網(wǎng)仿真環(huán)境的時候,可以同步生成OpenDrive高精地圖
—— 對于動態(tài)場景構(gòu)建,提供了圖形化的交互式場景編輯器 Scenario Editor
3)德國IPG – CarMaker
類型:以傳統(tǒng)動力學(xué)仿真為基礎(chǔ)優(yōu)勢發(fā)展起來的自動駕駛仿真平臺
平臺特點:
- 支持與第三方軟件進(jìn)行聯(lián)合仿真:ADAMS、 AVLCruise、 rFpro 等
- 包括道路、交通環(huán)境、車輛、駕駛員的閉環(huán)仿真系統(tǒng)
—— IPG Road:可以模擬多車道、 十字路口等多種形式的道路, 并可通過配置 GUI生成錐形、 圓柱形等形式的路障
—— IPG Traffic:提供豐富的交通對象模型,如車輛、 行人、 路標(biāo)、交通燈、 道路施工建筑等
—— IPG Driver:提供可自學(xué)習(xí)的駕駛員模型
- 支持高精地圖的導(dǎo)入/導(dǎo)出
—— 支持從HERE HD Live Maps導(dǎo)入地圖數(shù)據(jù)
—— 支持ROAD5和OpenDrive 格式導(dǎo)出地圖數(shù)據(jù)
- 支持在高性能計算 (HPC) 集群上并行執(zhí)行大量測試目錄
- 支持在Docker容器中運行,具有良好的可移植性和可擴(kuò)展性
4)英偉達(dá)- Drive Constellation
類型:基于虛幻引擎開發(fā),由兩臺服務(wù)器構(gòu)成的自動駕駛仿真平臺
平臺構(gòu)成:
a.第一臺服務(wù)器硬件構(gòu)成:由8個英偉達(dá)RTX Turing GPU
作用:運行DRIVE Sim軟件來模擬仿真自動駕駛車輛上的傳感器數(shù)據(jù)(包括攝像頭、毫米波雷達(dá)、激光雷達(dá)、IMU和GNSS)以及駕駛場景數(shù)據(jù);
b.第二臺服務(wù)器硬件構(gòu)成:自動駕駛車輛目標(biāo)AI ECU
作用:用于處理第一臺服務(wù)器傳輸過來的模擬數(shù)據(jù),如傳感器仿真數(shù)據(jù)
平臺特點:
- 較高真實度:作為一種實時的硬件在環(huán)解決方案,可以測試和驗證與將來會搭載在自動駕駛車輛中完全相同軟件和硬件系統(tǒng)
- 云仿真工作流:在無縫的端到端工作流中執(zhí)行自動駕駛測試。用戶可以遠(yuǎn)程訪問 DRIVE Constellation 并將模擬場景提交給云端的車輛測試車隊,然后進(jìn)行可視化測試并以較快的速度給出評估結(jié)果
- 可擴(kuò)展性:該平臺支持在數(shù)據(jù)中心進(jìn)行大規(guī)模部署,能夠并行運行各種仿真測試;且在DRIVEConstellation平臺中的每一英里的測試都包含感興趣事件(特殊工況),能夠在很短的時間內(nèi)完成數(shù)月或數(shù)年的測試
- 完整的反饋回路:第一臺服務(wù)器運行 DRIVE Sim 軟件,該軟件模擬仿真駕駛場景以及自動駕駛車輛上產(chǎn)生的傳感器數(shù)據(jù)。然后將模擬仿真的傳感器數(shù)據(jù)發(fā)送到第二臺服務(wù)器上進(jìn)行數(shù)據(jù)處理,最后第二臺服務(wù)器再將駕駛決策信號輸出給第一臺服務(wù)器,因此便形成了一個仿真閉環(huán)
英偉達(dá)- DriveConstellation 仿真平臺(來源-英偉達(dá)官網(wǎng))
5)微軟 – AirSim
類型:建立在虛幻引擎(Unreal Engine)上的無人機(jī)及自動駕駛開源仿真平臺
平臺特點:
- 建立在虛幻引擎(Unreal Engine)上的無人機(jī)及自動駕駛模擬研究項目,能夠打造出高逼真的交通環(huán)境,實現(xiàn)車輛及傳感器仿真模擬
- 完成車輛建模測試:AirSim包含車輛模擬、城市道路場景,并提供可簡化編程的API以及即插即用的代碼
- 快速構(gòu)建豐富場景:AirSim 可提供詳細(xì)的 3D 城市街景,包括交通信號燈、公園、湖泊、工地等豐富的場景
- AI 研究平臺:AirSim 提供包括 C++ 和 Python 等多語言的API 接口。使用者可同時使用 AirSim 和眾多機(jī)器學(xué)習(xí)工具。主要用于測試深度學(xué)習(xí)、 計算機(jī)視覺和自主車輛的端到端的強(qiáng)化學(xué)習(xí)算法
6)巴塞羅那自治大學(xué)(聯(lián)合豐田研究院和英特爾實驗室) – CARLA
類型:基于虛幻引擎開發(fā),采用服務(wù)器和多客戶端架構(gòu)的開源平臺
平臺特點:
- 用于城市自動駕駛系統(tǒng)的開發(fā)、訓(xùn)練和驗證的開源模擬器
- 提供開源數(shù)字?jǐn)?shù)據(jù)資源(包括城市布局、建筑以及車輛)搭建的自動駕駛測試訓(xùn)練場景
- 可使用Vector Zero的道路搭建軟件RoadRunner制作場景和配套的高精地圖
- 研究三種自動駕駛方法的性能:傳統(tǒng)的模塊化流水線,通過模仿學(xué)習(xí)訓(xùn)練得到的端到端模型,通過強(qiáng)化學(xué)習(xí)訓(xùn)練得到的端到端模型
7)LG電子 - LGSVLSimulator
類型:基于游戲引擎-Unity研發(fā)的自動駕駛開源仿真平臺
平臺特點:
- 模擬器支持ROS、ROS2和Cyber RT,提供了自動駕駛開源平臺Autoware和百度Apollo的集成
- 支持自動駕駛系統(tǒng)的軟件在環(huán)(SIL)和硬件在環(huán)(HIL)測試
- 虛擬場景構(gòu)建—— 提供Python API,使用戶能夠通過編寫腳本來創(chuàng)建所需的虛擬場景
—— 高精地圖:支持創(chuàng)建、編輯和導(dǎo)入/導(dǎo)出現(xiàn)有3D環(huán)境的高清地圖
注:高精地圖支持的導(dǎo)入/導(dǎo)出格式:
a.支持的導(dǎo)入格式:Apollo5.0高清地圖、Autoware Vector map、Lanelet2和OpenDrive 1.4
b. 支持的導(dǎo)出格式:Apollo 5.0、Lanelet2和OpenDrive 1.4
LGSVL工作流程(來源:公眾號-自動駕駛仿真)
2.4 國內(nèi)科技公司–云仿真平臺
傳統(tǒng)的仿真測試一般是單機(jī)仿真測試,但高階自動駕駛系統(tǒng)的商業(yè)化應(yīng)用,需要進(jìn)行龐大數(shù)量測試場景的仿真測試;海量的數(shù)據(jù)存儲,運算及處理已經(jīng)成為擺在自動駕駛研發(fā)道路上一道障礙,而云平臺的分布式架構(gòu)、加速計算能力以及高數(shù)據(jù)算力的特性,能夠可以很好的解決這一問題,進(jìn)而能夠極大地提升系統(tǒng)研發(fā)和驗證測試效率;因此,云平臺仿真必將是未來自動駕駛仿真測試技術(shù)的發(fā)展趨勢,同時也會是企業(yè)開展自動駕駛開發(fā)的核心技術(shù)壁壘之一。
附表4. 國內(nèi)科技公司云仿真平臺信息梳理
1) 百度 – Apollo云仿真平臺
主要應(yīng)用:
- 內(nèi)部:支撐Apollo系統(tǒng)的開發(fā)與迭代
- 外部:為Apollo生態(tài)開發(fā)者提供基于云端的決策系統(tǒng)仿真服務(wù)
平臺特點:
- 搭建在百度云和微軟Azure上的云仿真平臺
- 與Unity合作,開發(fā)基于 Unity 引擎的虛擬仿真環(huán)境
- 提出了端到端的自動駕駛仿真系統(tǒng):AADS系統(tǒng) - 基于數(shù)據(jù)驅(qū)動的交通流仿真框架 + 基于圖像渲染的場景圖片合成框架
2)華為 – 自動駕駛云服務(wù)Octopus
平臺提供三大服務(wù):數(shù)據(jù)服務(wù)、訓(xùn)練服務(wù)、仿真服務(wù);服務(wù)覆蓋自動駕駛數(shù)據(jù)、模型、訓(xùn)練、仿真、標(biāo)注等全生命周期業(yè)務(wù);
- 數(shù)據(jù)服務(wù):數(shù)據(jù)處理、數(shù)據(jù)湖治理、數(shù)據(jù)存儲等
- 訓(xùn)練服務(wù):大數(shù)據(jù)AI平臺、模型管理、分布式訓(xùn)練任務(wù)等
- 仿真服務(wù):場景庫、仿真系統(tǒng)、評測系統(tǒng)等
平臺提供的三大服務(wù)
平臺特點:
- 解耦四大關(guān)鍵要素 - 硬件、數(shù)據(jù)、算法、高精地圖,構(gòu)建以數(shù)據(jù)驅(qū)動為核心,驅(qū)動自動駕駛閉環(huán)迭代的開放平臺
- 數(shù)據(jù)的自動化處理:數(shù)據(jù)自動挖掘(平臺可支持PB級數(shù)據(jù)量存儲和億級數(shù)據(jù)秒級檢索)和數(shù)據(jù)自動化標(biāo)注(可節(jié)省超過70%的標(biāo)注人力成本)
- 一站式自動駕駛DevOps能力:通過從代碼接入、版本管理,再到仿真、評測,形成了一套完整的、閉環(huán)的自動化評測系統(tǒng)
- 大規(guī)模并行仿真:系統(tǒng)每日虛擬測試?yán)锍炭沙^1000萬公里,評測指標(biāo)200+,支持3000個實例并發(fā)測試
- 真實場景數(shù)字孿生:可以將真實路采的典型路段數(shù)據(jù)轉(zhuǎn)換成仿真場景,并與高精地圖相結(jié)合,實現(xiàn)真場景數(shù)字孿生,可以實現(xiàn)95%以上的場景還原能力
3) 騰訊 – TAD Sim Cloud
平臺特點:
- 分布式架構(gòu),支持在Windows、Linux和Web環(huán)境下部署
- 海量場景加速測試:該云平臺支持一萬個以上場景的并行計算,且1000個場景的運行時間縮短至4分鐘
- 虛擬城市技術(shù)加速測試:可加載城市級高精地圖,并同時部署上百萬輛交通流車輛和上千臺自動駕駛主車
- 構(gòu)建自研的閉環(huán)仿真模型:自研車輛動力學(xué)、傳感器、交通流、地圖和場景編輯等全套模型,并支持OpenX系列和OSI國際仿真標(biāo)準(zhǔn)
騰訊云平臺系統(tǒng)架構(gòu)(來源-自動駕駛云論壇演講報告)
4)阿里 – 混合式仿真測試平臺
平臺特點:
- 引進(jìn)真實路測場景和云端訓(xùn)練師,采用虛擬與現(xiàn)實結(jié)合的仿真技術(shù);
- 規(guī)模化地解決了極端場景的復(fù)現(xiàn)難題:通過任意改變極端場景變量,平臺可在30秒內(nèi)復(fù)現(xiàn)一次極端場景;解決了極端場景數(shù)據(jù)不足,自動駕駛AI模型訓(xùn)練效率低的問題
- 每日虛擬測試?yán)锍坛^800萬公里
三、仿真測試評價體系
3.1 仿真測試評價維度及具體評價內(nèi)容
1)兩個重要評價維度:真實性和有效性
a. 真實性評價:主要是針對場景庫真實合理性的評價,分為場景信息真實度、場景分布真實度兩個方面
真實度評價的兩個維度
場景信息真實度:在場景在構(gòu)建過程中,需要合理準(zhǔn)確的在虛擬環(huán)境中渲染測試場景中的靜態(tài)環(huán)境要素(如交通設(shè)施、道路及障礙物等)、動態(tài)環(huán)境要素(動態(tài)指示設(shè)施、通信環(huán)境信息)、交通參與者要素(機(jī)動車/非機(jī)動車、行人等)以及氣象環(huán)境要素(環(huán)境溫度、光照條件、天氣情況)等信息。
場景分布真實度:在參數(shù)重組場景中對于由特征元素組合和人工編輯合成的場景,由于人工修改參數(shù)后可能會出現(xiàn)真實世界不存在的場景,因此在人工編輯場景時需參考真實世界場景的參數(shù)值范圍去合理化地設(shè)置參數(shù)重組場景。
b. 有效性評價
目前尚未統(tǒng)一的有效性評價標(biāo)準(zhǔn),當(dāng)前可參考的標(biāo)準(zhǔn)如下:
2)具體評價內(nèi)容:仿真測試自身評價以及自動駕駛車輛駕駛性能、駕駛協(xié)調(diào)性、標(biāo)準(zhǔn)匹配性、學(xué)習(xí)進(jìn)化性等方面;
自動駕駛仿真測試評價項目
注:評價項目內(nèi)容參考《2020中國自動駕駛仿真藍(lán)皮書》
3.2 仿真測試評價標(biāo)準(zhǔn)示例
評價方法:(兩種)
- 基于功能的評價方法:針對特定的自動駕駛功能,在給定測試場景的前提下,判斷測試的自動駕駛汽車是否可以在該場景中安全行駛
- 基于場景的評價方法:將測試車輛置于測試場景中,在自動駕駛汽車能夠安全行駛的前提下,判斷該場景的復(fù)雜程度,例如周圍環(huán)境的復(fù)雜程度或駕駛?cè)蝿?wù)的復(fù)雜程度等
評價指標(biāo):(兩類)
- 通過性評價指標(biāo):針對自動駕駛做出判斷以及規(guī)定場景內(nèi)必須實現(xiàn)目標(biāo)的評價;如安全性、完備性、經(jīng)濟(jì)性、人工干預(yù)度等評價指標(biāo),量化上采取0/1機(jī)制
- 性能評價指標(biāo):表征自動駕駛汽車在具體測試場景下預(yù)期功能實現(xiàn)的程度;如智能性、舒適性、擬人性等評價指標(biāo),量化上采取差值機(jī)制
參考:評價標(biāo)準(zhǔn)參考《自動駕駛系統(tǒng)功能測試第7部分:仿真測試(征求意見稿)》
結(jié)語
自動駕駛仿真測試發(fā)展面臨的挑戰(zhàn)
1)場景庫建設(shè)
- 沒有統(tǒng)一的數(shù)據(jù)格式標(biāo)準(zhǔn),企業(yè)之間的場景庫建設(shè)缺乏合作,資源重復(fù)性投入大;
- 場景庫數(shù)據(jù)的標(biāo)注、分析提取等環(huán)節(jié)仍然依靠大量人工,場景庫建設(shè)效率低,成本高;
- 場景庫的覆蓋率依然不高,不足以覆蓋常見的交通場景;
- 窮舉覆蓋全場景的測試用例與測試效率和測試精度如何平衡。
2)仿真平臺
- 測試場景有限,在測試方法的標(biāo)準(zhǔn)化與仿真虛擬測試應(yīng)用上還較為薄弱;
- 目前尚無一款完美的自動駕駛仿真軟件,能夠?qū)崿F(xiàn)所有模塊的仿真測試功能,仍然需要多個仿真軟件進(jìn)行聯(lián)合仿真;不同自動駕駛仿真軟件,往往需要開發(fā)不同的仿真接口,不僅增加了時間成本,也增加了工程師的學(xué)習(xí)成本;
- 仿真環(huán)境缺乏現(xiàn)實世界物理現(xiàn)實的真實性和豐富性,并且訓(xùn)練效果有限,可擴(kuò)展性差;
- 系統(tǒng)仿真軟件也存在自身固有的弱點,比如仿真模型需要對邊界條件進(jìn)行明確的假設(shè),但現(xiàn)實中這些邊界條件不一定能明確或者不能真實地獲取;
- 傳感器模型、車輛動力學(xué)模型以及道路環(huán)境模型的準(zhǔn)確性都會影響到仿真測試結(jié)果準(zhǔn)確性,因此提高仿真測試結(jié)果的可信度也是當(dāng)前一個較大的挑戰(zhàn)。
3)測試評價體系
- 不同的企業(yè)采用的仿真軟件系統(tǒng)架構(gòu)和場景庫構(gòu)建方法不盡相同,導(dǎo)致很難建立統(tǒng)一規(guī)范的仿真測試評價體系;
- 仿真軟件自身的真實性和有效性方面的評價尚無統(tǒng)一的標(biāo)準(zhǔn)規(guī)范,且車輛的學(xué)習(xí)進(jìn)化性方面還缺乏相應(yīng)評價標(biāo)準(zhǔn)。
自動駕駛仿真測試技術(shù)發(fā)展趨勢展望
1)基于云平臺的高并發(fā)測試、加速測試是仿真測試未來重要的發(fā)展方向,是自動駕駛仿真企業(yè)的核心競爭力之一;云平臺具備海量數(shù)據(jù)存儲、處理和管理的能力,支持大規(guī)模仿真構(gòu)建,覆蓋海量駕駛場景;可有效建立城市級地理信息+虛擬交通流信息,可實現(xiàn)跨專業(yè)多用戶信息交互與共享。
2)功能安全場景庫、V2X場景庫以及預(yù)期功能安全場景庫將是未來場景庫建設(shè)的重點;不同廠商采用統(tǒng)一數(shù)據(jù)格式標(biāo)準(zhǔn),共建基礎(chǔ)場景庫,形成通用的、可移植的場景庫。
3)混合交通仿真測試將是未來自動駕駛仿真技術(shù)的一個重要研究領(lǐng)域;自動駕駛汽車取代傳統(tǒng)汽車不是一蹴而就的事情,必然在相當(dāng)?shù)囊欢螘r間內(nèi)處于兩者共存的局面,因此傳統(tǒng)汽車與自動駕駛汽車混行將是一種常見的交通場景。甚至還需要建立自動駕駛車輛在不同滲透率下的混合交通仿真模型。
4)數(shù)字孿生技術(shù)將為自動駕駛仿真測試發(fā)展道路上的一大助力,是仿真測試的增效利器; 數(shù)字孿生就是在虛擬環(huán)境中建立一個和現(xiàn)實世界一致的模型。自動駕駛數(shù)字孿生測試VRIL(Virtual Reality in the Loop)即真實的車輛在真實的測試場地中進(jìn)行測試,將同時映射到虛擬的測試環(huán)境中,從而完成虛、實狀態(tài)的同步,實現(xiàn)整個數(shù)字孿生系統(tǒng)的閉環(huán)實時仿真測試。
5)當(dāng)前自動駕駛仿真測試主要還是偏向于傳統(tǒng)的主被動層面的安全性及可靠性等方面的測試驗證,以及用于感知、規(guī)劃決策及控制算法的研發(fā)或迭代升級;但是每個自動駕駛車輛都不是孤立存在的,必然是網(wǎng)聯(lián)化的,是作為整個智慧交通體系中的一個智能節(jié)點而存在,因此信息安全方向的驗證測試與評價也必然是未來自動駕駛仿真測試的一個重要研究方向。