Hil是軟件測(cè)試還是硬件測(cè)試、hil是軟件測(cè)試還是硬件測(cè)試
針對(duì)智能船艇的技術(shù)特點(diǎn),上海交通大學(xué)海洋智能裝備與系統(tǒng)教育部重點(diǎn)實(shí)驗(yàn)室提出智能船艇測(cè)試驗(yàn)證方法:構(gòu)建模型在環(huán)測(cè)試、軟件在環(huán)測(cè)試、硬件在環(huán)測(cè)試、實(shí)船驗(yàn)證環(huán)節(jié),通過真實(shí)件與仿真件之間的逐一替換,逐步完成船艇的測(cè)試驗(yàn)證工作。
表 智能船艇測(cè)試驗(yàn)證方法
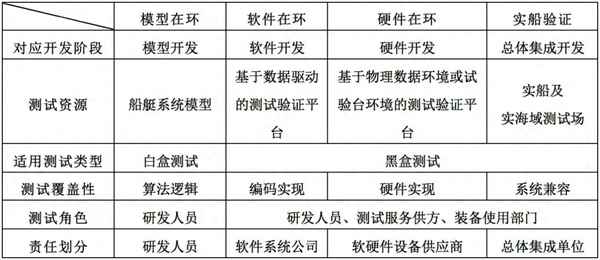
1、模型在環(huán) Model in the Loop, MIL
模型在環(huán)測(cè)試主要服務(wù)于新控制算法策略的探索開發(fā),主要參與對(duì)象一般為企業(yè)新技術(shù)的研發(fā)人員或?qū)W術(shù)機(jī)構(gòu)研究人員。除了數(shù)理層面上的推導(dǎo)分析外,模型驅(qū)動(dòng)的開發(fā)及仿真環(huán)境主要有MATLAB/Simulink、C/C++、Python等,主要為動(dòng)態(tài)腳本語言,開展白盒測(cè)試便于遇到問題時(shí)快速進(jìn)行修改。當(dāng)然,MIL測(cè)試的前提是要有被控對(duì)象模型,如描述船艇操縱運(yùn)動(dòng)的Abkowitz方程或MMG方程。
2、軟件在環(huán) Software in the Loop, SIL
船艇智能系統(tǒng)軟件開發(fā)人員將經(jīng)過模型在環(huán)測(cè)試的策略算法/軟件,使用C/C++等編譯型語言進(jìn)行轉(zhuǎn)換開發(fā),得到鏈接庫(kù)或可執(zhí)行文件形式、命令行或圖形交互界面的軟件后,輔以合適的軟件配置參數(shù),即可進(jìn)行軟件在環(huán)測(cè)試。軟件在環(huán)測(cè)試采用黑盒測(cè)試,主要驗(yàn)證的是控制器的模型與代碼實(shí)現(xiàn)之間的一致性。通過使用基于數(shù)據(jù)驅(qū)動(dòng)的驗(yàn)證平臺(tái),可以通過靈活設(shè)立邊界條件、加大運(yùn)算負(fù)荷、提升計(jì)算精度、限制計(jì)算資源等方式及早發(fā)現(xiàn)控制器算法和代碼實(shí)現(xiàn)中存在的隱患,進(jìn)一步檢驗(yàn)極端參數(shù)環(huán)境下控制器算法及應(yīng)用軟件的可靠性及優(yōu)越性。該環(huán)節(jié)的典型測(cè)試對(duì)象有:避碰算法軟件、感知信息多元融合處理軟件、自動(dòng)舵控制軟件等。
3、硬件在環(huán) Hardware in the Loop, HIL
硬件在環(huán)測(cè)試,又稱半實(shí)物測(cè)試,是將船艇智能系統(tǒng)中需要測(cè)試的部分硬件直接置于仿真回路中的測(cè)試系統(tǒng),它不僅彌補(bǔ)了純數(shù)字仿真中相關(guān)硬件仿真模塊精度較低等缺陷,提高了整個(gè)測(cè)試系統(tǒng)的置信度,而且可以大大減輕編程的工作量。測(cè)試時(shí),基于物理數(shù)據(jù)環(huán)境或試驗(yàn)臺(tái)環(huán)境的驗(yàn)證平臺(tái)與實(shí)際硬件通過各種信息通道相連,共同完成測(cè)試仿真工作,并將測(cè)試仿真結(jié)果在電腦中進(jìn)行分析,從而判斷硬件的運(yùn)行情況。應(yīng)用硬件在環(huán)測(cè)試使仿真條件更接近于實(shí)際情況,更能正確地對(duì)設(shè)計(jì)出的硬件系統(tǒng)性能進(jìn)行檢驗(yàn)和調(diào)試,有利于開發(fā)新型硬件系統(tǒng)和算法,減少現(xiàn)場(chǎng)調(diào)試次數(shù)。該環(huán)節(jié)的典型測(cè)試對(duì)象有:嵌入式工控機(jī)、光電跟蹤設(shè)備與計(jì)算顯卡等。
4、實(shí)船驗(yàn)證 Sea Test, ST
復(fù)雜海洋環(huán)境將對(duì)智能船艇效能產(chǎn)生較大影響。例如,在我國(guó)首次實(shí)海況下智能船艇競(jìng)賽2019“海上爭(zhēng)鋒”中國(guó)智能船艇挑戰(zhàn)賽中,參賽船艇出現(xiàn)了諸如因水面反光導(dǎo)致目標(biāo)檢測(cè)虛警、波浪抨擊導(dǎo)致跟蹤目標(biāo)頻繁丟失、甲板上浪導(dǎo)致光學(xué)識(shí)別失效等智能算法應(yīng)用問題,導(dǎo)致任務(wù)失敗。因此,船艇智能系統(tǒng)即使通過了模型在環(huán)、軟件在環(huán)及硬件在環(huán)測(cè)試,在投入工程應(yīng)用前,實(shí)船驗(yàn)證環(huán)節(jié)不可或缺。該環(huán)節(jié)由裝備采購(gòu)部門或無人艇總體集成單位提出請(qǐng)求,由具有測(cè)試服務(wù)資質(zhì)的第三方機(jī)構(gòu),依據(jù)智能船艇任務(wù)需求在實(shí)海域測(cè)試場(chǎng)中構(gòu)建任務(wù)場(chǎng)景,開展完備的系統(tǒng)兼容測(cè)試驗(yàn)證。






